メニュー
メニュー
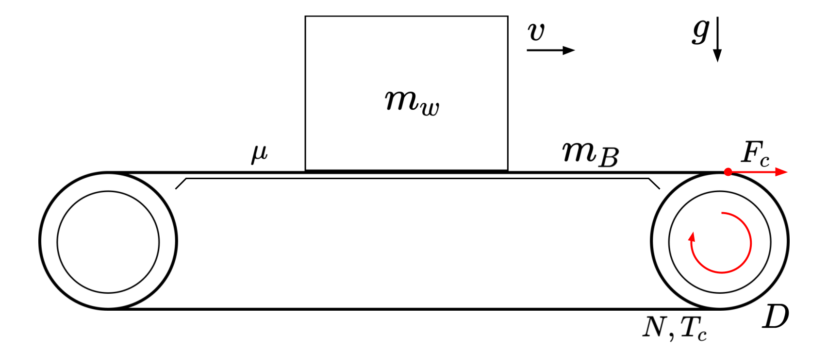
| 駆動プーリ径 | $$D$$ | ||
| 搬送速度 | $$v$$ | ||
| ベルトガイド・ベルト間の摩擦係数 | $$\mu$$ | ||
| 重力加速度 | $$g$$ | ||
| ワークの質量 | $$m_w$$ | ||
| ベルトの質量 | $$m_b$$ | ||
| 駆動プーリ-ベルトの伝動効率 | $$\eta$$ |
| 駆動プーリ回転数 | $$N=\frac{v}{D/2}\frac{60}{2\pi}$$ | ||
| 所要搬送力 | $$\displaystyle F_c=\mu g \left(m_w+\frac{m_b}{2}\right)$$ | ||
| 所要搬送トルク | $$T_c=\eta F_c D$$ |
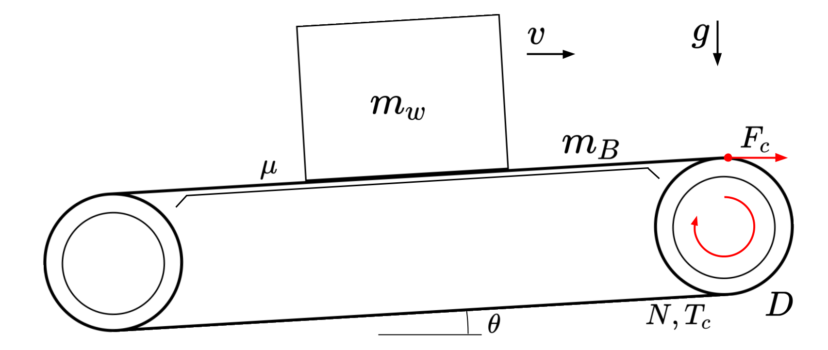
| 駆動プーリ径 | $$D$$ | ||
| 搬送速度 | $$v$$ | ||
| ベルトガイド・ベルト間の摩擦係数 | $$\mu$$ | ||
| 重力加速度 | $$g$$ | ||
| ワークの質量 | $$m_w$$ | ||
| ベルトの質量 | $$m_b$$ | ||
| 駆動プーリ-ベルトの伝動効率 | $$\eta$$ | ||
| 傾斜角度 | $$\theta$$ |
| 駆動プーリ回転数 | $$N=\frac{v}{D/2}\frac{60}{2\pi}$$ | ||
| 所要搬送力 | $$\displaystyle F_c=\mu g \left(m_w+\frac{m_b}{2}\right)+m_w g\sin\theta$$ | ||
| 所要搬送トルク | $$T_c=\eta F_c D$$ |
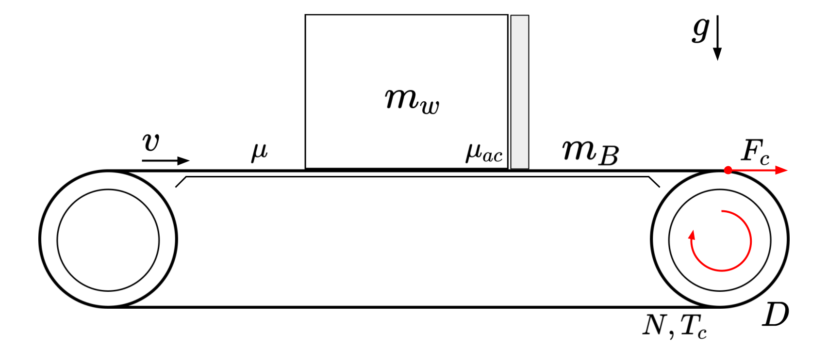
| 駆動プーリ径 | $$D$$ | ||
| 搬送速度 | $$v$$ | ||
| ベルトガイド・ベルト間の摩擦係数 | $$\mu$$ | ||
| ワーク・ベルト間の摩擦係数 | $$\mu_{ac}$$ | ||
| 重力加速度 | $$g$$ | ||
| ワークの質量 | $$m_w$$ | ||
| ベルトの質量 | $$m_b$$ | ||
| 駆動プーリ-ベルトの伝動効率 | $$\eta$$ |
| 駆動プーリ回転数 | $$N=\frac{v}{D/2}\frac{60}{2\pi}$$ | ||
| 所要搬送力 | $$F_c=\mu g \left(m_w+\frac{m_b}{2}\right) + \mu_{ac}m_w g$$ | ||
| 所要搬送トルク | $$T_c=\eta F_c D$$ |
ものづくりのススメでは、機械設計の業務委託も承っております。
ご相談は無料ですので、以下のリンクからお気軽にお問い合わせください。

機械設計の無料見積もり
機械設計のご依頼も承っております。こちらからお気軽にご相談ください。
構想設計 / 基本設計 / 詳細設計 / 3Dモデル / 図面 / etc...

歯車計算ツール
ボールねじ 計算ツール