メニュー
メニュー

| ストローク | $$st$$ | ||
| 最小送り量 | $$S$$ | ||
|
|
|
|
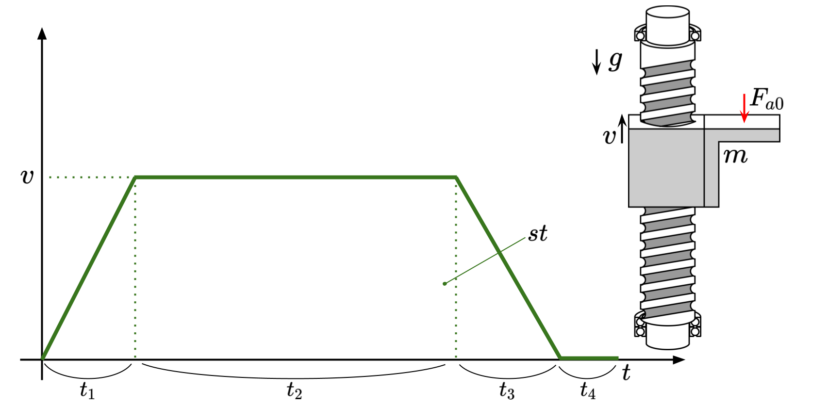
| 最大速度 | $$v$$ | ||
|
|
|
|
| ワーク重量 | $$m$$ | ||
| 重力加速度 | $$g$$ | ||
| 軸方向の外部荷重 | $$F_{a}$$ |
$$t_2=\frac{(st)}{v}-\frac{1}{2}(t_1+t_3)$$
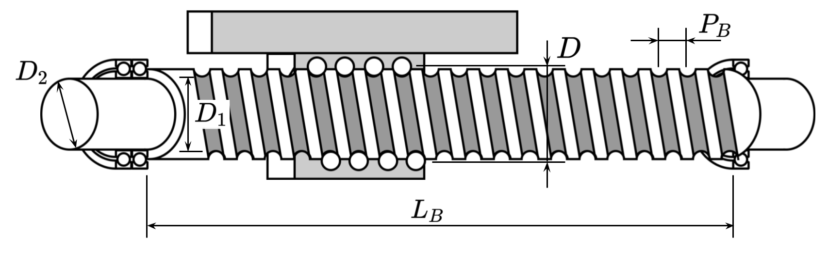
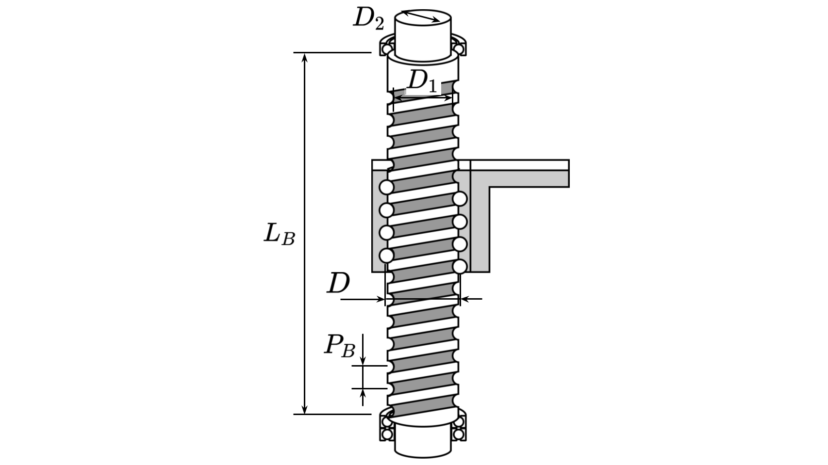
| ボール中心径 | $$D$$ | ||
| ねじ軸谷径 | $$D_1$$ | ||
| ボールねじ端末軸径 | $$D_2$$ | ||
| ボールねじリード | $$P_B$$ | ||
| ボールねじ取付けピッチ | $$L_B$$ | ||
| ねじ軸の断面二次モーメント※1 | $$I=\frac{\pi D_1^4}{64}$$ | ||
| ボールねじのイナーシャ | $$J_B$$ | ||
| ヤング率 | $$E$$ | ||
| 密度 | $$\rho$$ | ||
| 案内面の摩擦係数※2 | $$\mu$$ | ||
| 案内面の抵抗(無負荷時) | $$f$$ | ||
| 座屈に関する端末条件係数 | $$\lambda_1$$ | ||
| 許容回転数に関する端末条件係数 | $$\lambda_2$$ | ||
| ねじ軸の許容引張圧縮応力※3 | $$\sigma'$$ | ||
| ねじ軸の許容曲げ応力※4 | $$\sigma_M'$$ | ||
| ねじ軸の許容ねじり応力※5 | $$\tau_T'$$ | ||
| DN値 | $$DN$$ | ||
| 基本静定格荷重 | $$C_0$$ | ||
| 基本動定格荷重 | $$C$$ | ||
| 静的安全係数※6 | $$f_s$$ | ||
| 荷重係数※7 | $$f_w$$ | ||
| ボールねじの効率※8 | $$\eta$$ | ||
| 予圧荷重※9,※10 | $$F_p$$ |
| モータの定格トルク | $$T_{M}'$$ | ||
| モータの瞬時最大トルク | $$T_{Mmax}'$$ | ||
| モータのブレーキトルク | $$T_{MB}'$$ | ||
| モータの慣性モーメント | $$J_M$$ | ||
| 減速比 | $$i$$ |
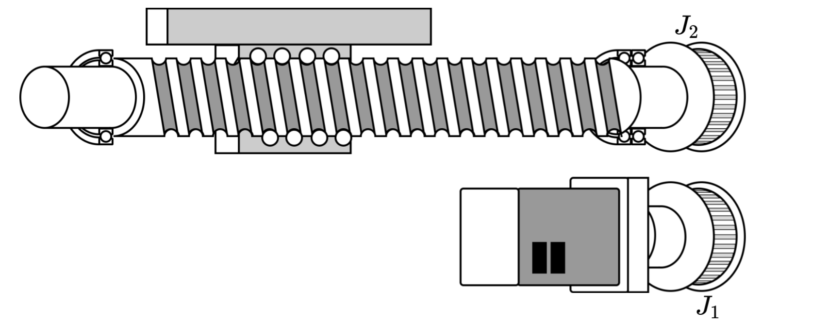
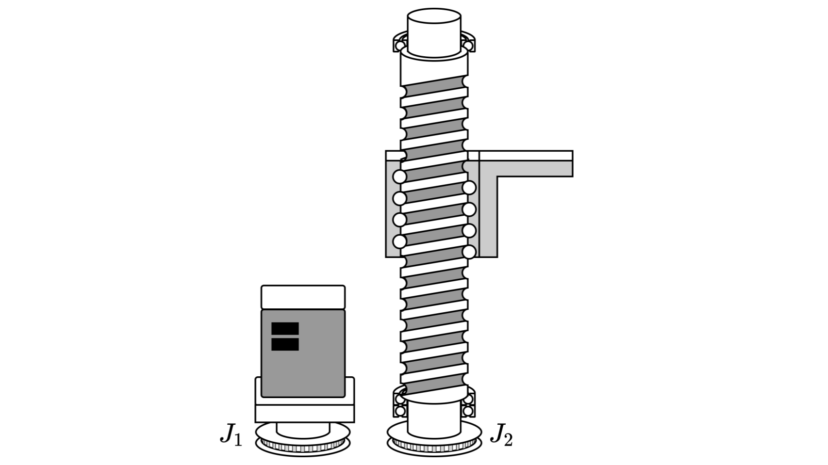
| モータ軸に取付く機械要素のイナーシャ※1 | $$J_1$$ | ||
| 負荷軸に取付く機械要素のイナーシャ※2 | $$J_2$$ | ||
| オイルシール等による摩擦トルク※2 | $$T_f$$ | ||
| ねじ軸末端にかかる曲げモーメント※3 | $$M$$ |
|
|
|
|
| 最大軸方向荷重 | $$F_{max}=\max(|F_1|,|F_2|,|F_3|)$$ | ||
| ねじ軸の座屈荷重 | $$F_B'=\lambda_1\frac{\pi^2EI}{L^2_B}$$ | ||
| ねじ軸の許容引張圧縮荷重 | $$F_T'=\frac{\sigma\pi D^2_1}{4}$$ | ||
|
|
|
|
| 転動体の許容軸方向荷重 | $$F_R=\frac{C_0}{f_s}$$ |
| ボールねじの回転数※1 | $$N_B=\frac{60v}{P_B}$$ | ||
| 危険速度による許容回転数※1 | $$N_1'=\frac{60\lambda_2^2}{2\pi L_B^2}\sqrt{\frac{EI\cdot10^3}{\rho\pi D_1^2/4}}$$ | ||
| DN値による許容回転数※1 | $$N_2'=\frac{(DN)}{D}$$ | ||
| 許容回転数※1 | $$N'=\min(N_1', N_2')$$ | ||
| 安全率(回転数)※1 | $$SF_N=\frac{N'}{N_B}$$ |
| 定格寿命(総回転数) | $$L=\left(\frac{C}{f_w F_{max}}\right)^3\cdot10^6$$ | ||
| 寿命時間 | $$L_h=\frac{LP_B}{2\cdot60^2(st)/t}$$ | ||
| 走行距離寿命 | $$L_s=LP_B$$ |
| 所要モータ回転数※1 | $$N_M=\frac{60v}{P_B}i$$ | ||
| 負荷イナーシャ※1 | $$J=J_1+\left(J_2+J_B+m\left(\frac{P_B}{2\pi}\right)^2\right)\cdot\frac{1}{i^2}$$ | ||
| 予圧によるトルク※2 | $$T_p=0.05\left(\frac{P_B}{\pi D}\right)^{-0.5}\cdot\frac{F_pP_B}{2\pi}$$ | ||
| 外部荷重によるトルク※2 | $$T_a=\frac{F_{max}P_B}{2\pi\eta}$$ | ||
| 所要等速トルク※1 | $$T_2=\frac{T_p+T_a+T_f}{i}$$ | ||
|
|
|
|
| 所要定格トルク※1 | $$T_{Rated}=\sqrt{\frac{T_1^2t_1+T_2^2t_2+T_3^2t_3}{t}}$$ | ||
| 所要ブレーキトルク※1 | $$T_{MB}=\frac{(F_a-\mu mg-f)P_B}{2\pi \eta i}$$ | ||
|
|
|
|
| 所要分解能※1 | $$B=\frac{P_B}{iS}$$ | ||
| イナーシャ比※1 | $$J_{ratio}=\frac{J}{J_M}$$ |
| 相当曲げモーメント | $$M_e=\frac{M+\sqrt{M^2+T^2}}{2}$$ | ||
| 相当ねじりモーメント | $$T_{e}=\sqrt{M^2+T^2}$$ | ||
| 所要ねじ軸末端径(対曲げ) | $$D_M=\sqrt[3]{\frac{32M_e}{\pi \sigma_M}}$$ | ||
| 所要ねじ軸末端径(対ねじり) | $$D_T=\sqrt[3]{\frac{16T_e}{\pi \tau_M}}$$ | ||
| 所要ねじ軸末端径 | $$D_2'=\max(D_M, D_T)$$ |
| ストローク | $$st$$ | ||
| 最小送り量 | $$S$$ | ||
|
|
|
|
| 最大速度 | $$v$$ | ||
|
|
|
|
| ワーク重量 | $$m$$ | ||
| 重力加速度 | $$g$$ | ||
| 軸方向の外部荷重 | $$F_{a}$$ |
$$t_2=\frac{(st)}{v}-\frac{1}{2}(t_1+t_3)$$
| ボール中心径 | $$D$$ | ||
| ねじ軸谷径 | $$D_1$$ | ||
| ボールねじ端末軸径 | $$D_2$$ | ||
| ボールねじリード | $$P_B$$ | ||
| ボールねじ取付けピッチ | $$L_B$$ | ||
| ねじ軸の断面二次モーメント※1 | $$I=\frac{\pi D_1^4}{64}$$ | ||
| ボールねじのイナーシャ | $$J_B$$ | ||
| ヤング率 | $$E$$ | ||
| 密度 | $$\rho$$ | ||
| 案内面の抵抗(無負荷時) | $$f$$ | ||
| 座屈に関する端末条件係数 | $$\lambda_1$$ | ||
| 許容回転数に関する端末条件係数 | $$\lambda_2$$ | ||
| ねじ軸の許容引張圧縮応力※3 | $$\sigma'$$ | ||
| ねじ軸の許容曲げ応力※4 | $$\sigma_M'$$ | ||
| ねじ軸の許容ねじり応力※5 | $$\tau_T'$$ | ||
| DN値 | $$DN$$ | ||
| 基本静定格荷重 | $$C_0$$ | ||
| 基本動定格荷重 | $$C$$ | ||
| 静的安全係数※6 | $$f_s$$ | ||
| 荷重係数※7 | $$f_w$$ | ||
| ボールねじの効率※8 | $$\eta$$ | ||
| 予圧荷重※9,※10 | $$F_p$$ |
| モータの定格トルク | $$T_{M}'$$ | ||
| モータの瞬時最大トルク | $$T_{Mmax}'$$ | ||
| モータのブレーキトルク | $$T_{MB}'$$ | ||
| モータの慣性モーメント | $$J_M$$ | ||
| 減速比 | $$i$$ |
| モータ軸に取付く機械要素のイナーシャ※1 | $$J_1$$ | ||
| 負荷軸に取付く機械要素のイナーシャ※2 | $$J_2$$ | ||
| オイルシール等による摩擦トルク※2 | $$T_f$$ | ||
| ねじ軸末端にかかる曲げモーメント※3 | $$M$$ |
|
|
|
|
| 最大軸方向荷重 | $$F_{max}=\max(|F_1|,|F_2|,|F_3|)$$ | ||
| ねじ軸の座屈荷重 | $$F_B'=\lambda_1\frac{\pi^2EI}{L^2_B}$$ | ||
| ねじ軸の許容引張圧縮荷重 | $$F_T'=\frac{\sigma'\pi D^2_1}{4}$$ | ||
|
|
|
|
| 転動体の許容軸方向荷重 | $$F_R=\frac{C_0}{f_s}$$ |
| ボールねじの回転数※1 | $$N_B=\frac{60v}{P_B}$$ | ||
| 危険速度による許容回転数※1 | $$N_1'=\frac{60\lambda_2^2}{2\pi L_B^2}\sqrt{\frac{EI\cdot10^3}{\rho\pi D_1^2/4}}$$ | ||
| DN値による許容回転数※1 | $$N_2'=\frac{(DN)}{D}$$ | ||
| 許容回転数※1 | $$N'=\min(N_1', N_2')$$ | ||
| 安全率(回転数)※1 | $$SF_N=\frac{N'}{N_B}$$ |
| 定格寿命(総回転数) | $$L=\left(\frac{C}{f_w F_{max}}\right)^3\cdot10^6$$ | ||
| 寿命時間 | $$L_h=\frac{LP_B}{2\cdot60^2(st)/t}$$ | ||
| 走行距離寿命 | $$L_s=LP_B$$ |
| 所要モータ回転数※1 | $$N_M=\frac{60v}{P_B}i$$ | ||
| 負荷イナーシャ※1 | $$J=J_1+\left(J_2+J_B+m\left(\frac{P_B}{2\pi}\right)^2\right)\cdot\frac{1}{i^2}$$ | ||
| 予圧によるトルク※2 | $$T_p=0.05\left(\frac{P_B}{\pi D}\right)^{-0.5}\cdot\frac{F_pP_B}{2\pi}$$ | ||
| 外部荷重によるトルク※2 | $$T_a=\frac{F_{max}P_B}{2\pi\eta}$$ | ||
| 所要等速トルク※1 | $$T_2=\frac{T_p+T_a+T_f}{i}$$ | ||
|
|
|
|
| 所要定格トルク※1 | $$T_{Rated}=\sqrt{\frac{T_1^2t_1+T_2^2t_2+T_3^2t_3}{t}}$$ | ||
| 所要ブレーキトルク※1 | $$T_{MB}=\frac{(F_a+mg-f)P_B}{2\pi \eta i}$$ | ||
|
|
|
|
| 所要分解能※1 | $$B=\frac{P_B}{iS}$$ | ||
| イナーシャ比※1 | $$J_{ratio}=\frac{J}{J_M}$$ |
| 相当曲げモーメント | $$M_e=\frac{M+\sqrt{M^2+T^2}}{2}$$ | ||
| 相当ねじりモーメント | $$T_{e}=\sqrt{M^2+T^2}$$ | ||
| 所要ねじ軸末端径(対曲げ) | $$D_M=\sqrt[3]{\frac{32M_e}{\pi \sigma_M'}}$$ | ||
| 所要ねじ軸末端径(対ねじり) | $$D_T=\sqrt[3]{\frac{16T_e}{\pi \tau_M'}}$$ | ||
| 所要ねじ軸末端径 | $$D_2'=\max(D_M, D_T)$$ |
ものづくりのススメでは、機械設計の業務委託も承っております。
ご相談は無料ですので、以下のリンクからお気軽にお問い合わせください。

機械設計の無料見積もり
機械設計のご依頼も承っております。こちらからお気軽にご相談ください。
構想設計 / 基本設計 / 詳細設計 / 3Dモデル / 図面 / etc...
コンベヤ搬送 計算ツール
ねじり 計算ツール