メニュー
メニュー
寸法とはめあいを入力(500mm以下)
入力
結果
例
入力
結果
例
入力
結果
※「寸法/最大許容値/最小許容値」のように入力してください。
例
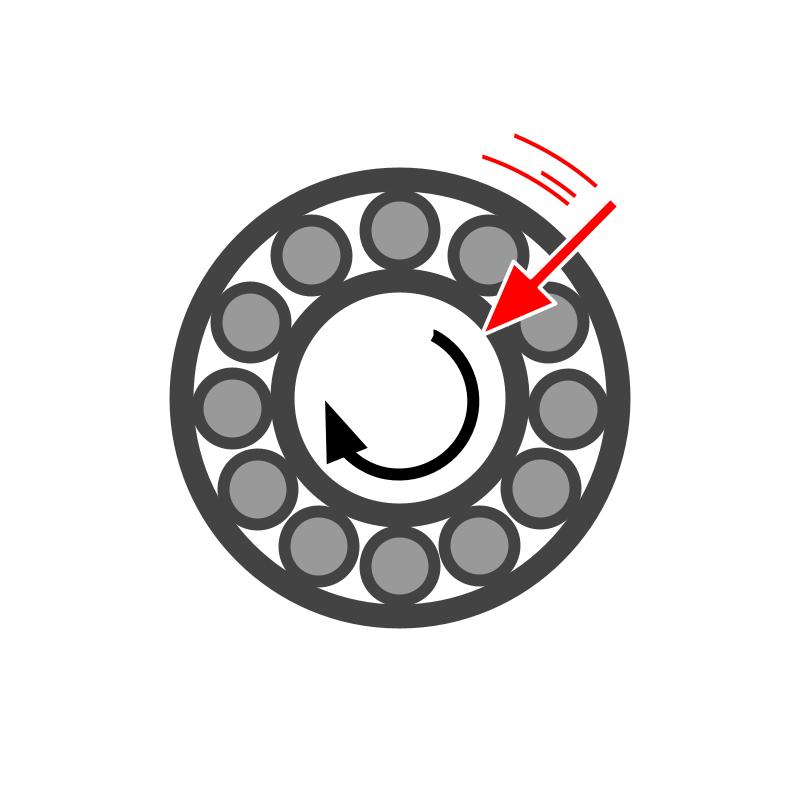
しばりばめ必須 (k, m, n, p, r)
すきまばめでも可 (F, G, H, JS)
事例: 軸の自重、モータ軸
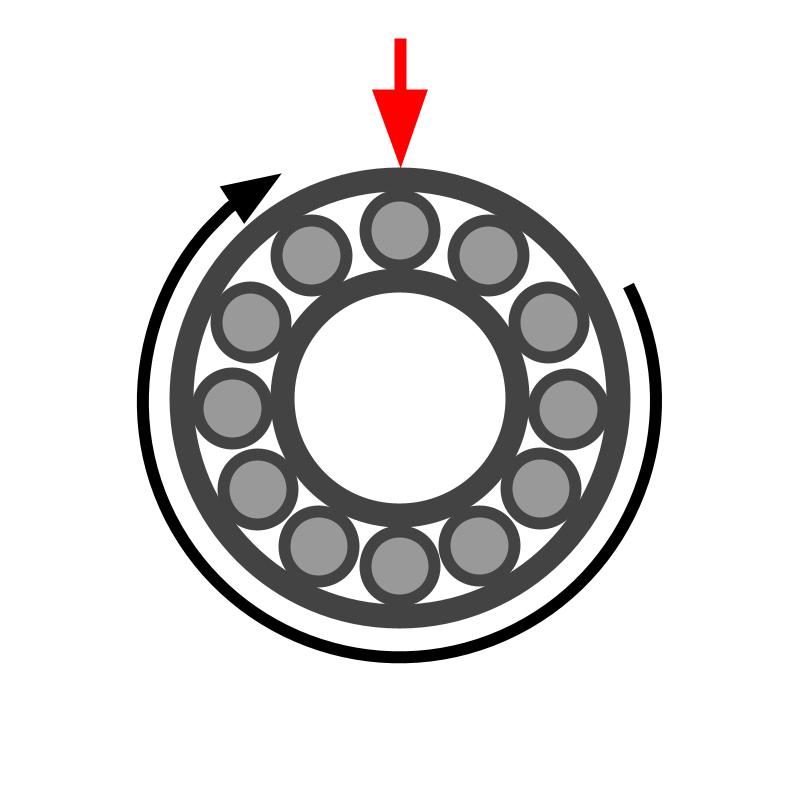
すきまばめでも可 (f, g, h, js)
しまりばめ必須 (K, M, N, P)
事例: アーム
すきまばめでも可 (f, g, h, js)
しまりばめ必須 (K, M, N, P)
事例: キャスター、滑車
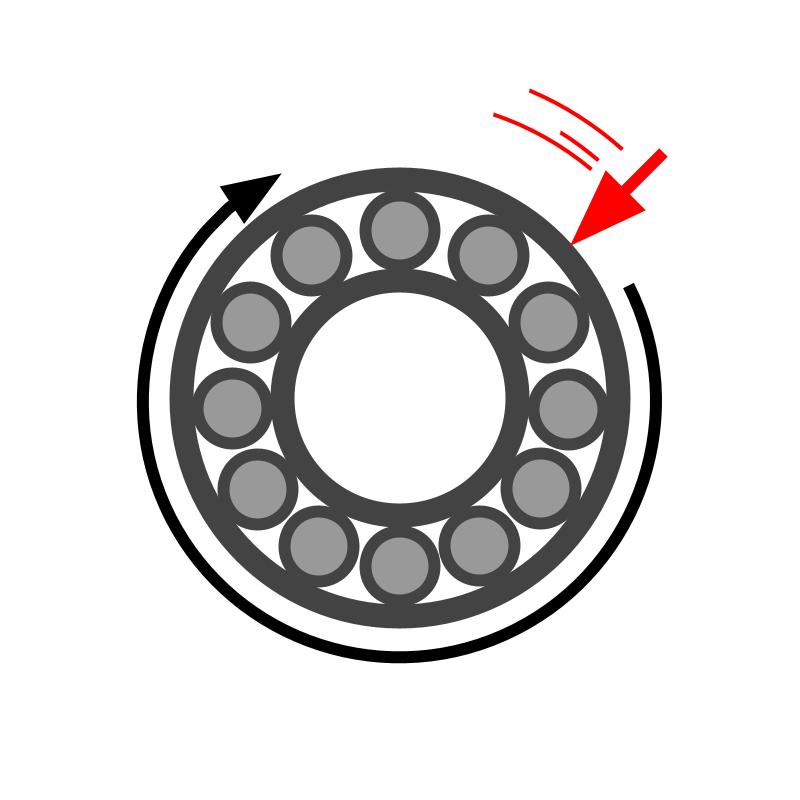
しばりばめ必須 (k, m, n, p, r)
すきまばめでも可 (F, G, H, JS)
事例: 振動ふるい

しばりばめ必須 (k, m, n, p, r)
しばりばめ必須 (K, M, N, P)
事例: ロボット軸
ものづくりのススメでは、機械設計の業務委託も承っております。
ご相談は無料ですので、以下のリンクからお気軽にお問い合わせください。

機械設計の無料見積もり
機械設計のご依頼も承っております。こちらからお気軽にご相談ください。
構想設計 / 基本設計 / 詳細設計 / 3Dモデル / 図面 / etc...
座屈荷重・座屈応力 計算ツール
重量計算 体積計算ツール