メニュー
メニュー
|
|
|
|
断面形状を選択してください。
|
|
| 端末条件係数 | $$C$$ | ||
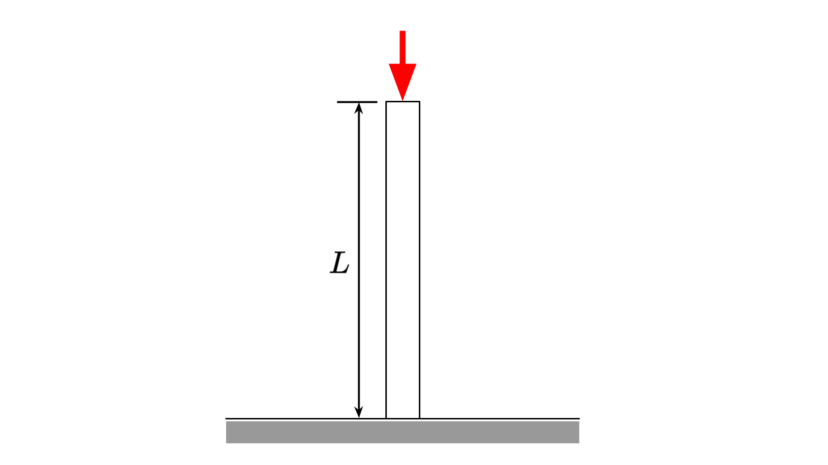
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
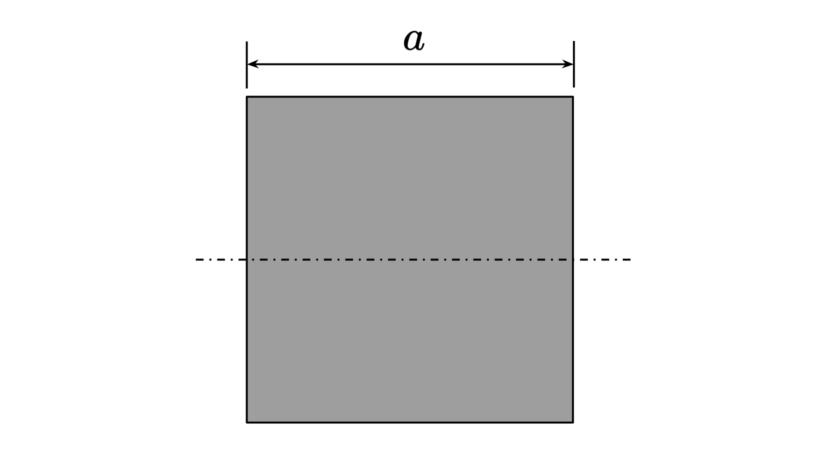
| 一辺の長さ | $$a$$ |
| 断面積 | $$A=a^2$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\frac{a^4}{12}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
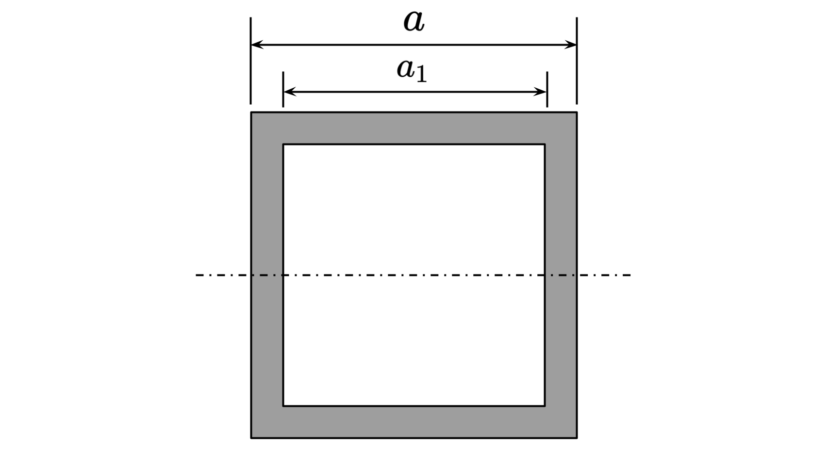
| 外幅 内幅 |
$$\begin{align}a\\a_1\end{align}$$ |
| 断面積 | $$A=a^2-a_1^2$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\frac{a^4-a_1^4}{12}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|

|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 幅 | $$b$$ | ||
| 高さ | $$h$$ |
| 断面積 | $$A=bh$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\min(\frac{bh^3}{12},\frac{b^3h}{12})$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
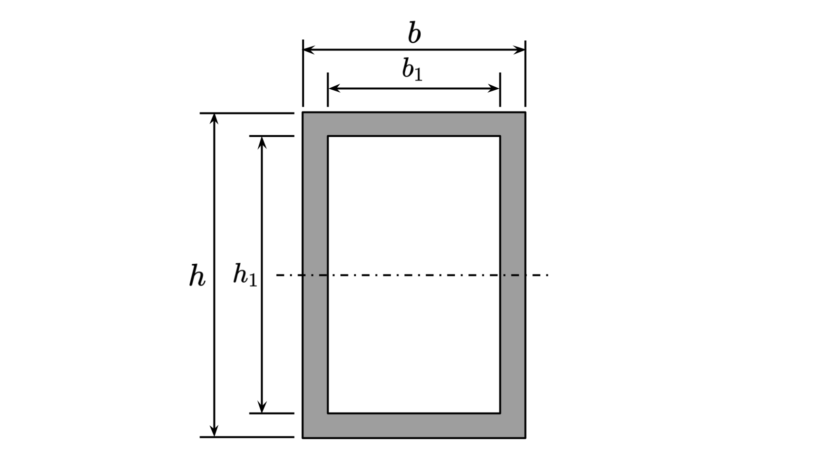
| 外幅 内幅 |
$$\begin{align}b\\b_1\end{align}$$ |
|
|
| 外高さ 内高さ |
$$\begin{align}h\\h_1\end{align}$$ |
|
| 断面積 | $$A=bh-b_1h_1$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\min(\frac{bh^3-b_1h_1^3}{12},\frac{b^3h-b_1^3h_1}{12})$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
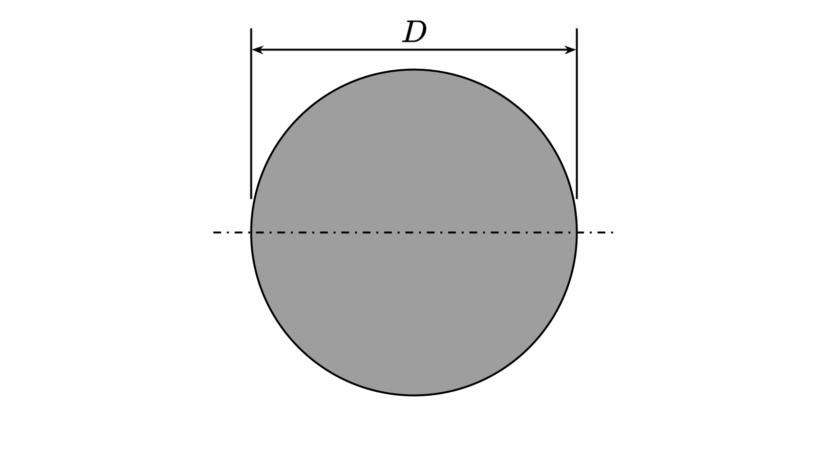
| 径 | $$D$$ |
| 断面積 | $$A=\frac{\pi D^2}{4}$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\frac{\pi D^4}{64}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
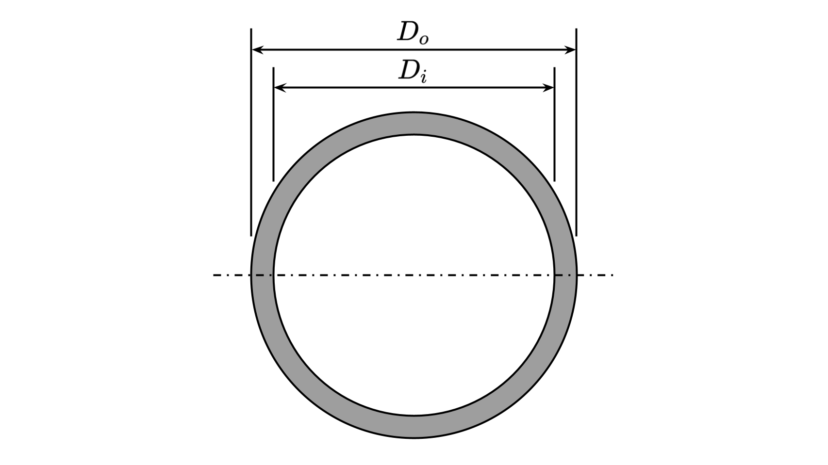
| 外径 内径 |
$$\begin{align}D_o\\D_i\end{align}$$ |
|
| 断面積 | $$A=\frac{\pi(D_o^2-D_i^2)}{4}$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\frac{\pi (D_o^4-D_i^4)}{64}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
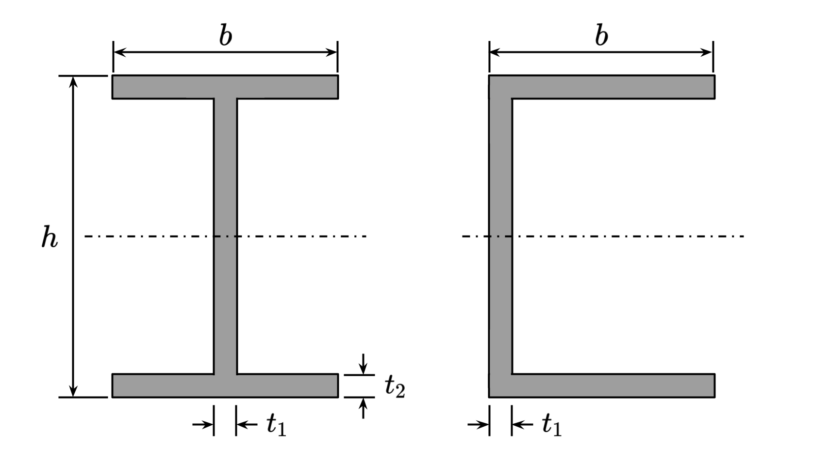
| 幅 | $$b$$ | ||
| 高さ | $$h$$ | ||
| ウェブ厚さ フランジ厚さ |
$$\begin{align}t_1\\t_2\end{align}$$ |
|
| 断面積 | $$A=bh-(b-t_1)(h-2t_2)$$ | ||
| 断面二次モーメント(弱軸回り) | $$\begin{align}I&=\min(\frac{bh^3-(b-t_1)(h-2t_2)^3}{12},\\&\frac{b^3h-(b-t_1)^3(h-2t_2)}{12})\end{align}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 断面積 | $$A$$ | ||
| 断面二次モーメント | $$I$$ |
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
断面形状を選択してください。
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 一辺の長さ | $$a$$ |
| 断面積 | $$A=a^2$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\frac{a^4}{12}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 外幅 内幅 |
$$\begin{align}a\\a_1\end{align}$$ |
|
| 断面積 | $$A=a^2-a_1^2$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\frac{a^4-a_1^4}{12}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 幅 | $$b$$ | ||
| 高さ | $$h$$ |
| 断面積 | $$A=bh$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\min(\frac{bh^3}{12},\frac{b^3h}{12})$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 外幅 内幅 |
$$\begin{align}b\\b_1\end{align}$$ |
|
|
| 外高さ 内高さ |
$$\begin{align}h\\h_1\end{align}$$ |
|
| 出力 | 断面積 | $$A=bh-b_1h_1$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\min(\frac{bh^3-b_1h_1^3}{12},\frac{b^3h-b_1^3h_1}{12})$$ | |||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | |||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | |||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | |||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 径 | $$D$$ |
| 断面積 | $$A=\frac{\pi D^2}{4}$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\frac{\pi D^4}{64}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 外径 内径 |
$$\begin{align}D_o\\D_i\end{align}$$ |
|
| 断面積 | $$A=\frac{\pi(D_o^2-D_i^2)}{4}$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\frac{\pi (D_o^4-D_i^4)}{64}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 幅 | $$b$$ | ||
| 高さ | $$h$$ | ||
| ウェブ厚さ フランジ厚さ |
$$\begin{align}t_1\\t_2\end{align}$$ |
|
| 断面積 | $$A=bh-(b-t_1)(h-2t_2)$$ | ||
| 断面二次モーメント(弱軸回り) | $$\begin{align}I&=\min(\frac{bh^3-(b-t_1)(h-2t_2)^3}{12},\\&\frac{b^3h-(b-t_1)^3(h-2t_2)}{12})\end{align}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 断面積 | $$A$$ | ||
| 断面二次モーメント | $$I$$ |
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
断面形状を選択してください。

|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 一辺の長さ | $$a$$ |
| 断面積 | $$A=a^2$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\frac{a^4}{12}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 外幅 内幅 |
$$\begin{align}a\\a_1\end{align}$$ |
|
| 断面積 | $$A=a^2-a_1^2$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\frac{a^4-a_1^4}{12}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 幅 | $$b$$ | ||
| 高さ | $$h$$ |
| 断面積 | $$A=bh$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\min(\frac{bh^3}{12},\frac{b^3h}{12})$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 外幅 内幅 |
$$\begin{align}b\\b_1\end{align}$$ |
|
|
| 外高さ 内高さ |
$$\begin{align}h\\h_1\end{align}$$ |
|
| 断面積 | $$A=bh-b_1h_1$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\min(\frac{bh^3-b_1h_1^3}{12},\frac{b^3h-b_1^3h_1}{12})$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 径 | $$D$$ |
| 断面積 | $$A=\frac{\pi D^2}{4}$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\frac{\pi D^4}{64}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 外径 内径 |
$$\begin{align}D_o\\D_i\end{align}$$ |
|
| 断面積 | $$A=\frac{\pi(D_o^2-D_i^2)}{4}$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\frac{\pi (D_o^4-D_i^4)}{64}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 幅 | $$b$$ | ||
| 高さ | $$h$$ | ||
| ウェブ厚さ フランジ厚さ |
$$\begin{align}t_1\\t_2\end{align}$$ |
|
| 断面積 | $$A=bh-(b-t_1)(h-2t_2)$$ | ||
| 断面二次モーメント(弱軸回り) | $$\begin{align}I&=\min(\frac{bh^3-(b-t_1)(h-2t_2)^3}{12},\\&\frac{b^3h-(b-t_1)^3(h-2t_2)}{12})\end{align}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 断面二次モーメント | $$I$$ | ||
| 断面積 | $$A$$ |
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
断面形状を選択してください。
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 一辺の長さ | $$a$$ |
| 断面積 | $$A=a^2$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\frac{a^4}{12}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 外幅 内幅 |
$$\begin{align}a\\a_1\end{align}$$ |
|
| 断面積 | $$A=a^2-a_1^2$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\frac{a^4-a_1^4}{12}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 幅 | $$b$$ | ||
| 高さ | $$h$$ |
| 断面積 | $$A=bh$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\min(\frac{bh^3}{12},\frac{b^3h}{12})$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 外幅 内幅 |
$$\begin{align}b\\b_1\end{align}$$ |
|
|
| 外高さ 内高さ |
$$\begin{align}h\\h_1\end{align}$$ |
|
| 断面積 | $$A=bh-b_1h_1$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\min(\frac{bh^3-b_1h_1^3}{12},\frac{b^3h-b_1^3h_1}{12})$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 径 | $$D$$ |
| 断面積 | $$A=\frac{\pi D^2}{4}$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\frac{\pi D^4}{64}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 外径 内径 |
$$\begin{align}D_o\\D_i\end{align}$$ |
|
| 断面積 | $$A=\frac{\pi(D_o^2-D_i^2)}{4}$$ | ||
| 断面二次モーメント(弱軸回り) | $$I=\frac{\pi (D_o^4-D_i^4)}{64}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
|
|
|
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 幅 | $$b$$ | ||
| 高さ | $$h$$ | ||
| ウェブ厚さ フランジ厚さ |
$$\begin{align}t_1\\t_2\end{align}$$ |
|
| 断面積 | $$A=bh-(b-t_1)(h-2t_2)$$ | ||
| 断面二次モーメント(弱軸回り) | $$\begin{align}I&=\min(\frac{bh^3-(b-t_1)(h-2t_2)^3}{12},\\&\frac{b^3h-(b-t_1)^3(h-2t_2)}{12})\end{align}$$ | ||
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
| 端末条件係数 | $$C$$ | ||
| 柱の長さ | $$L$$ | ||
| ヤング率 | $$E$$ | ||
| 断面積 | $$A$$ | ||
| 断面二次モーメント | $$I$$ |
| 断面二次半径 | $$i=\sqrt{\frac{I}{A}}$$ | ||
| 細長比 | $$\lambda=\sqrt{\frac{L}{i}}$$ | ||
| 座屈荷重 | $$F=C\frac{\pi^2EI}{L^2}$$ | ||
| 座屈応力 | $$\sigma=C\frac{\pi^2E}{\lambda^2}$$ |
ものづくりのススメでは、機械設計の業務委託も承っております。
ご相談は無料ですので、以下のリンクからお気軽にお問い合わせください。

機械設計の無料見積もり
機械設計のご依頼も承っております。こちらからお気軽にご相談ください。
構想設計 / 基本設計 / 詳細設計 / 3Dモデル / 図面 / etc...
梁のたわみ・曲げ応力 計算ツール
はめあい公差 計算・選定ツール