メニュー
メニュー
|
|
|
|
|
|
|
|
|
|
|
|
|
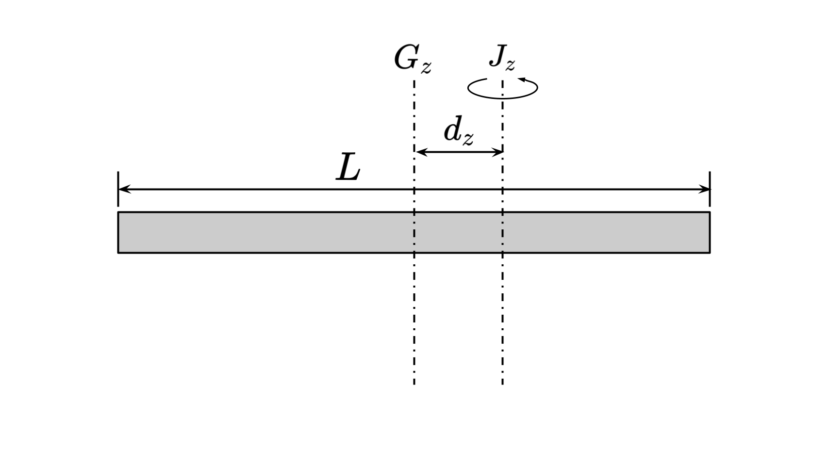
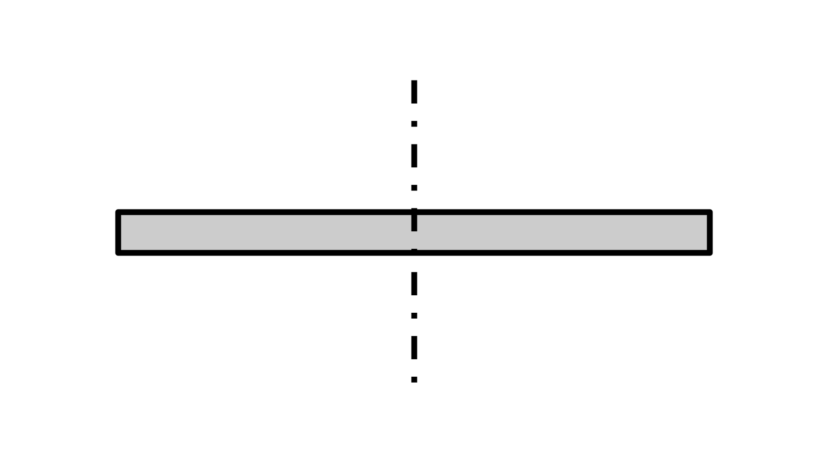
| 質量 | $$m$$ | ||
| 長さ | $$L$$ | ||
| 重心軸〜回転中心の距離 | $$d_z$$ |
| 慣性モーメント | $$J_z=m\left(\frac{1}{12}L^2+d_z^2\right)$$ |
| 線密度 | $$\rho$$ | ||
| 長さ | $$L$$ | ||
| 重心軸〜回転中心の距離 | $$d_z$$ |
| 慣性モーメント | $$J_z=\rho L\left(\frac{L^2}{12}+d_z^2\right)$$ |
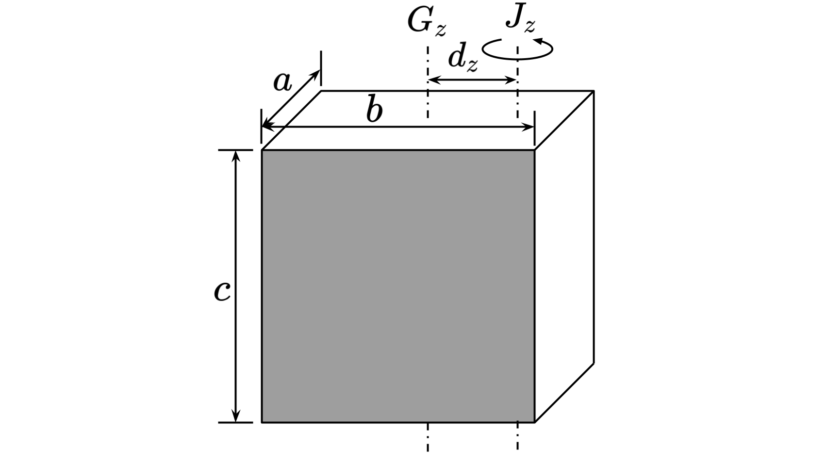
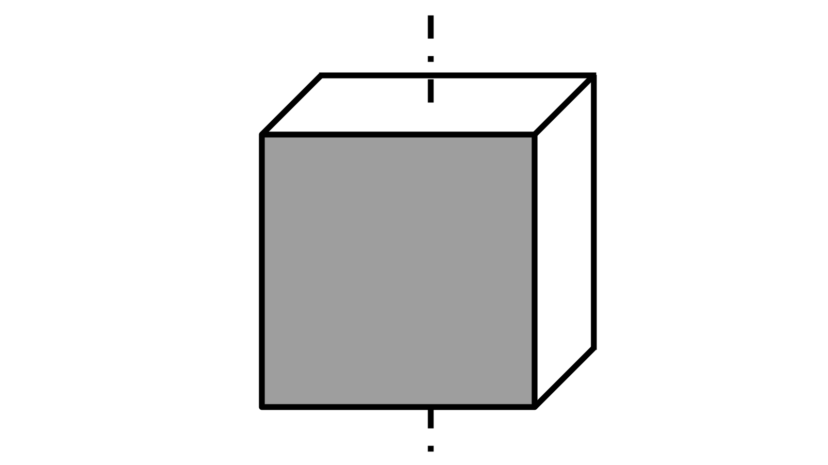
| 質量 | $$m$$ | ||
| 長さ | $$\begin{align}a\\b\end{align}$$ | |
|
| 重心軸〜回転中心の距離 | $$d_z$$ |
| 慣性モーメント | $$J_z=m\left(\frac{1}{12}(a^2+b^2)+d_z^2\right)$$ |
| 密度 | $$\rho$$ | ||
| 長さ | $$\begin{align}a\\b\\c\end{align}$$ | |
|
| 重心軸〜回転中心の距離 | $$d_z$$ |
| 慣性モーメント | $$J_z=\rho abc\left(\frac{1}{12}(a^2+b^2)+d_z^2\right)$$ |
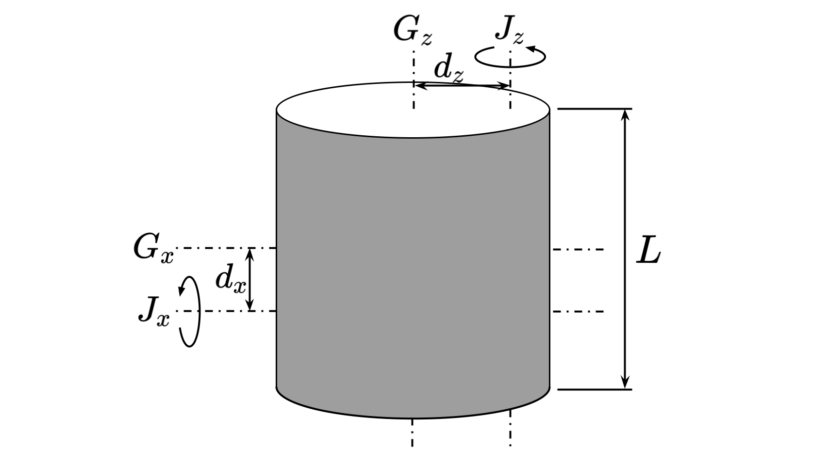
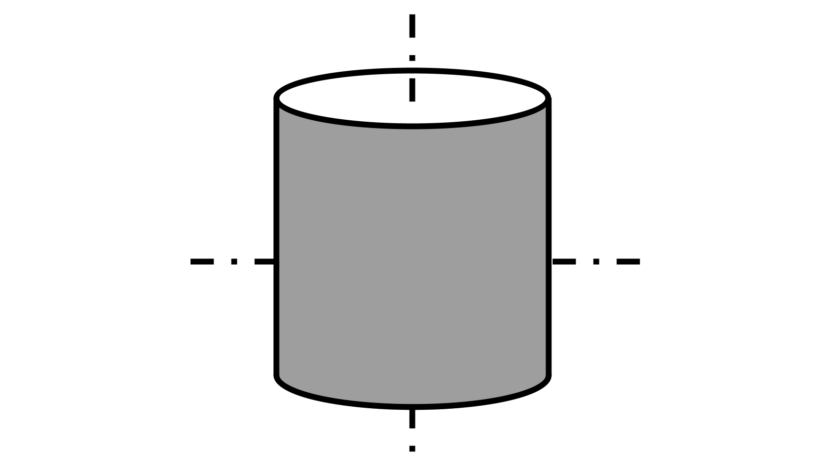
| 質量 | $$m$$ | ||
| 径 | $$D$$ | ||
| 長さ | $$L$$ | ||
| 重心軸〜回転中心の距離 | $$d_x$$ | ||
| 重心軸〜回転中心の距離 | $$d_z$$ |
| 慣性モーメント | $$J_x=m\left(\frac{1}{4}\left(\frac{D^2}{4}+\frac{L^2}{3}\right)+d_x^2\right)$$ | ||
| 慣性モーメント | $$J_z=m\left(\frac{1}{8}D^2+d_z^2\right)$$ |
| 密度 | $$\rho$$ | ||
| 径 | $$D$$ | ||
| 長さ | $$L$$ | ||
| 重心軸〜回転中心の距離 | $$d_x$$ | ||
| 重心軸〜回転中心の距離 | $$d_z$$ |
| 慣性モーメント | $$\begin{align}J_x&=\rho\frac{\pi D^2}{4}L\\&\cdot\left(\frac{1}{4}\left(\frac{D^2}{4}+\frac{L^2}{3}\right)+d_x^2\right)\end{align}$$ | ||
| 慣性モーメント | $$\begin{align}J_z&=\rho\frac{\pi D^2}{4}L\\&\cdot\left(\frac{1}{8}D^2+d_z^2\right)\end{align}$$ |
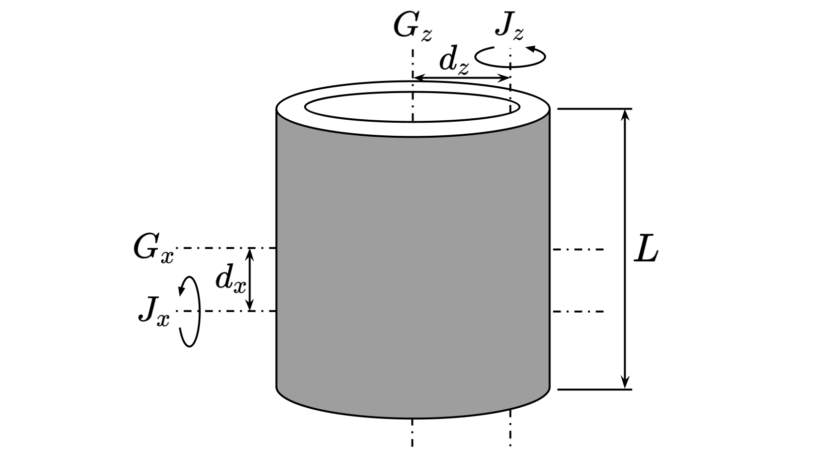
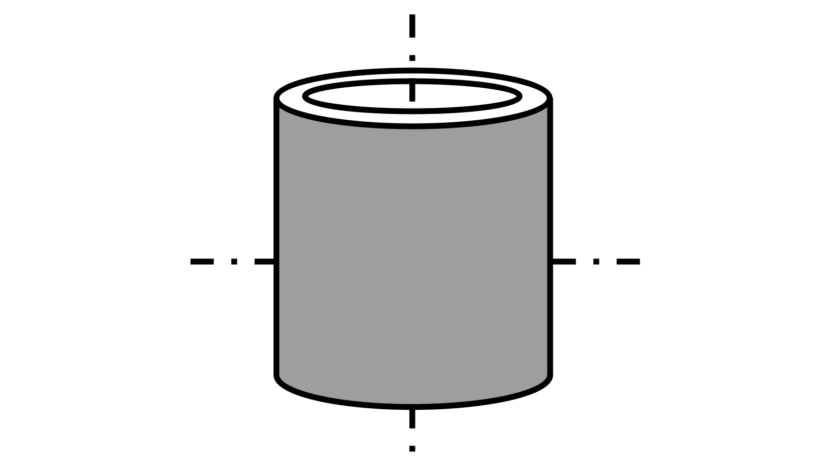
| 質量 | $$m$$ | ||
| 外径 内径 |
$$\begin{align}D_o\\D_i\end{align}$$ | |
|
| 長さ | $$L$$ | ||
| 重心軸〜回転中心の距離 | $$d_x$$ | ||
| 重心軸〜回転中心の距離 | $$d_z$$ |
| 慣性モーメント | $$J_x=m\left(\frac{1}{4}\left(\frac{(D_o^2+D_i^2)}{4}+\frac{L^2}{3}\right)+d_x^2\right)$$ | ||
| 慣性モーメント | $$J_z=m\left(\frac{1}{8}(D_o^2+D_i^2)+d_z^2\right)$$ |
| 密度 | $$\rho$$ | ||
| 外径 内径 |
$$\begin{align}D_o\\D_i\end{align}$$ | |
|
| 長さ | $$L$$ | ||
| 重心軸〜回転中心の距離 | $$d_x$$ | ||
| 重心軸〜回転中心の距離 | $$d_z$$ |
| 慣性モーメント | $$\begin{align}J_x&=\rho\frac{\pi(D_o^2-D_i^2)}{4}L\\&\cdot \left(\frac{1}{4}\left(\frac{(D_o^2+D_i^2)}{4}+\frac{L^2}{3}\right)+d_x^2\right)\end{align}$$ | ||
| 慣性モーメント | $$\begin{align}J_z&=\rho\frac{\pi(D_o^2-D_i^2)}{4}L\\&\cdot \left(\frac{1}{8}(D_o^2+D_i^2)+d_z^2\right)\end{align}$$ |
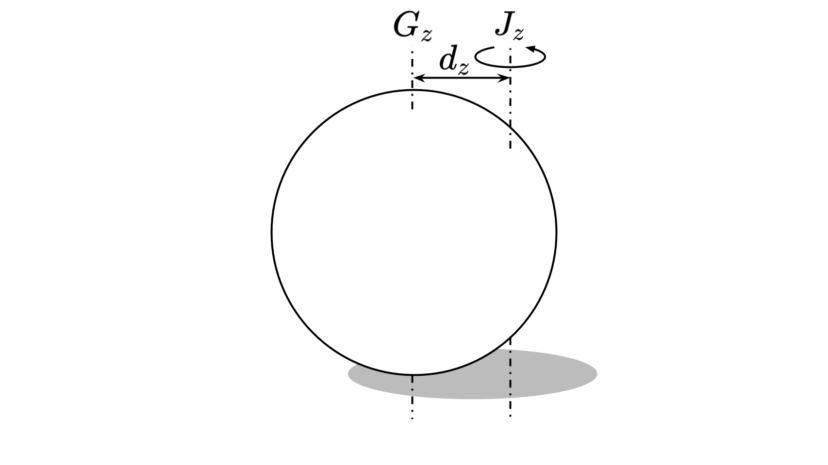
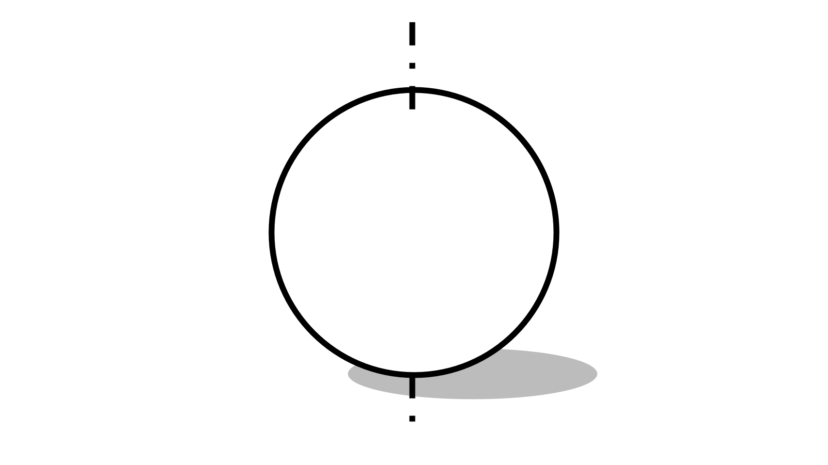
| 質量 | $$m$$ | ||
| 直径 | $$D$$ | ||
| 重心軸〜回転中心の距離 | $$d_z$$ |
| 慣性モーメント | $$J_z=m\left(\frac{1}{10}D^2+d_z^2\right)$$ |
| 密度 | $$\rho$$ | ||
| 直径 | $$D$$ | ||
| 重心軸〜回転中心の距離 | $$d_z$$ |
| 慣性モーメント | $$J_z=\rho\frac{\pi D^3}{6}\left(\frac{D^2}{10}+d_z^2\right)$$ |
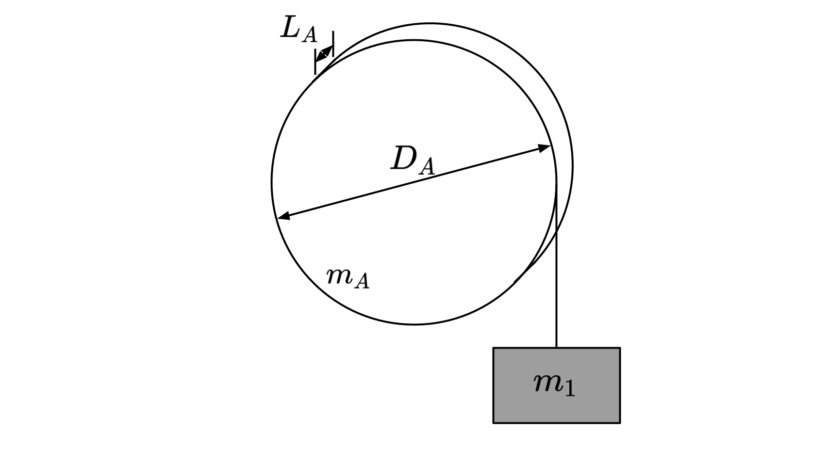
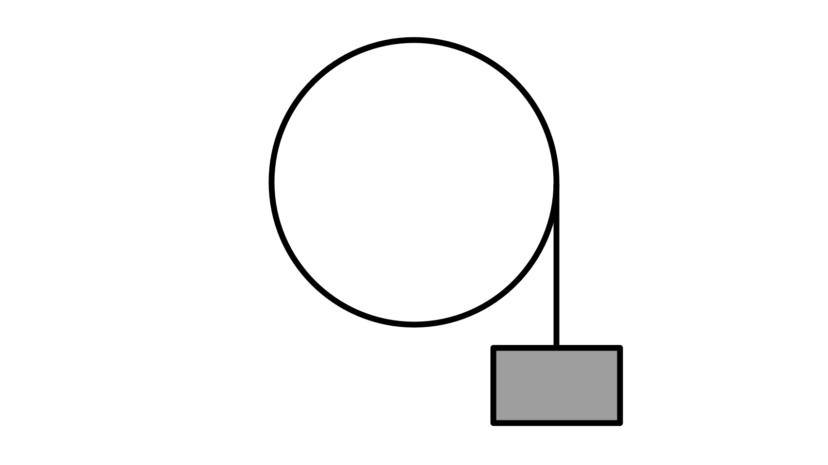
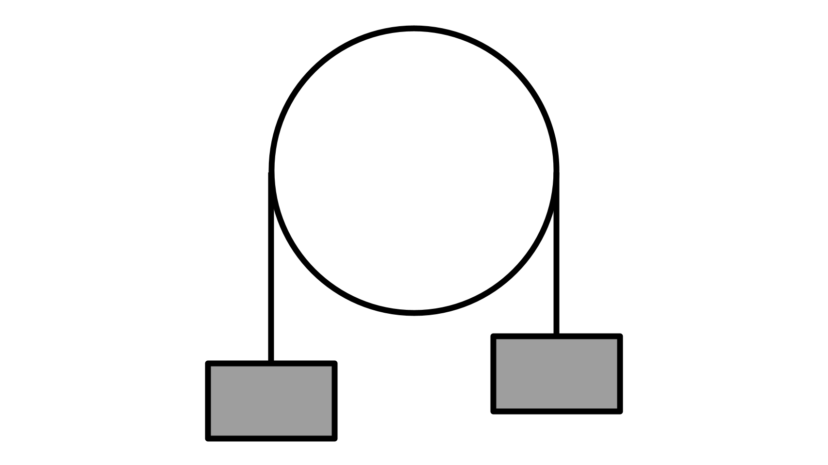
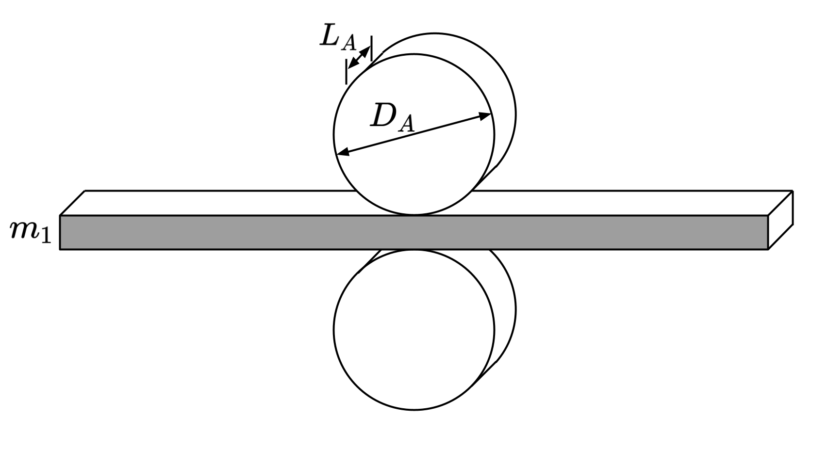
| ドラムの質量 | $$m_A$$ | ||
| ドラムの直径 | $$D_A$$ | ||
| 負荷の質量 | $$m_1$$ |
| 慣性モーメント | $$J=(m_A+2m_1)\cdot\frac{1}{8}D_A^2$$ |
| ドラムの密度 | $$\rho_A$$ | ||
| ドラムの直径 | $$D_A$$ | ||
| ドラムの長さ | $$L_A$$ | ||
| 負荷の質量 | $$m_1$$ |
| 慣性モーメント | $$J=\left(\rho_A\frac{\pi D_A^2}{4}L_A+2m_1\right)\cdot\frac{1}{8}D_A^2$$ |
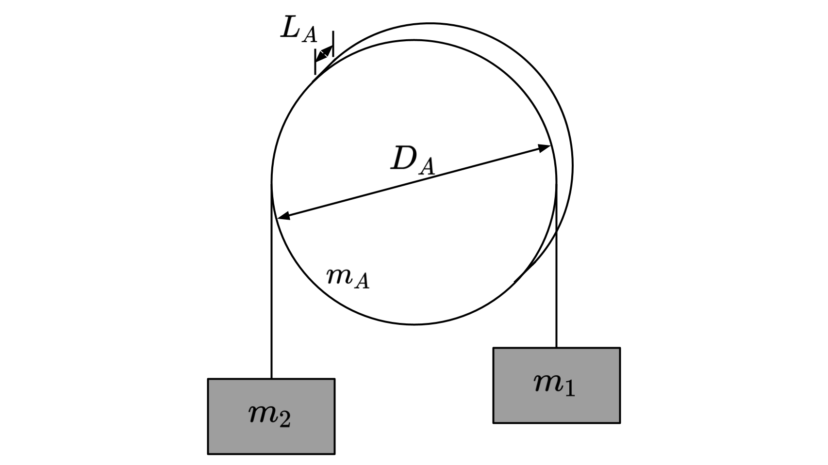
| ドラムの質量 | $$m_A$$ | ||
| ドラムの直径 | $$D_A$$ | ||
| ウェイトの質量 | $$\begin{align}m_1\\m_2\end{align}$$ | |
| 慣性モーメント | $$J=(m_A+2m_1+2m_2)\cdot\frac{1}{8}D_A^2$$ |
| ドラムの密度 | $$\rho_A$$ | ||
| ドラムの直径 | $$D_A$$ | ||
| ドラムの長さ | $$L_A$$ | ||
| ウェイトの質量 | $$\begin{align}m_1\\m_2\end{align}$$ | |
| 慣性モーメント | $$J=\left(\rho_A\frac{\pi D_A^2}{4}L_A+2m_1+2m_2\right)\cdot\frac{1}{8}D_A^2$$ |
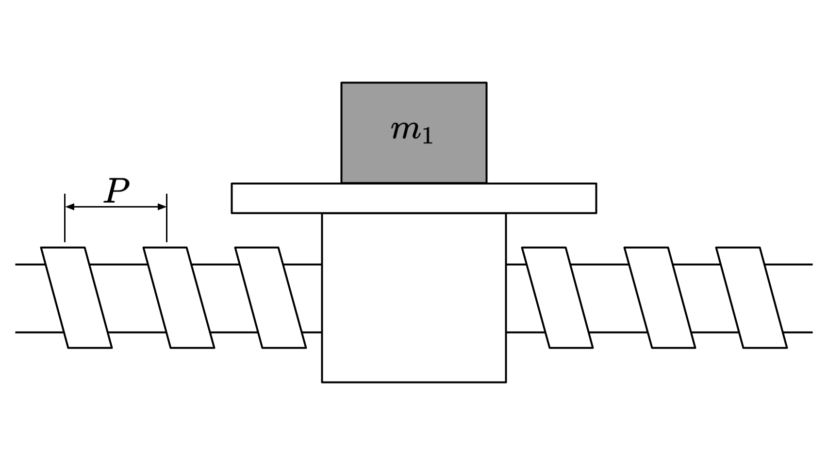
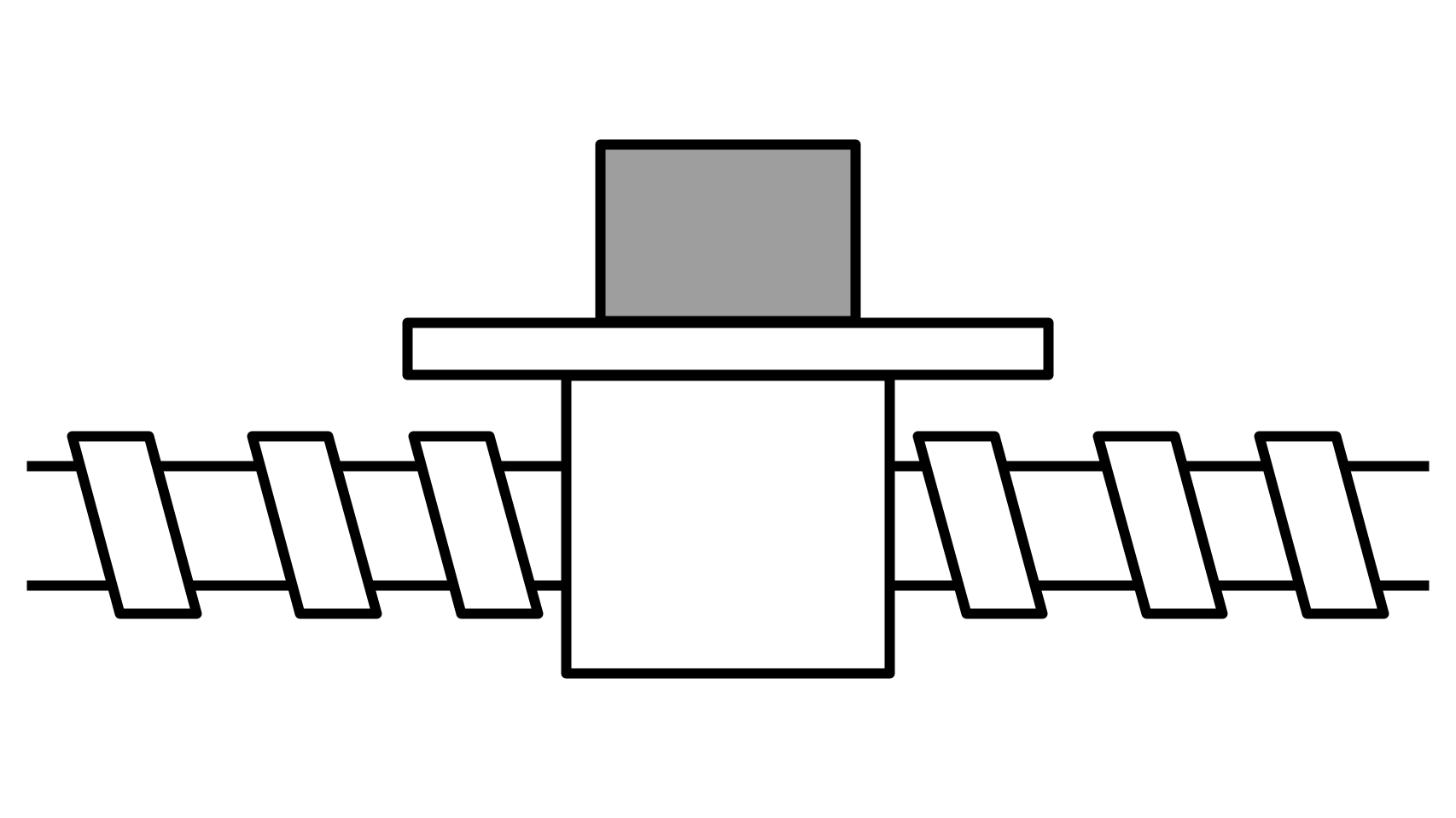
| 送りねじの慣性モーメント | $$J_A$$ | ||
| 負荷の質量 | $$m$$ | ||
| 送りねじのリード | $$P$$ |
| 送りねじ機構の慣性モーメント | $$J=J_A+\frac{mP^2}{4\pi^2}$$ |

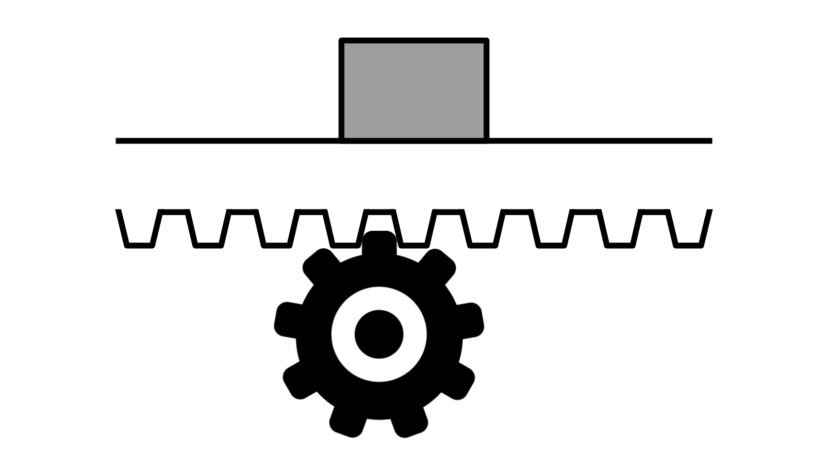
| ピニオンギアの慣性モーメント | $$J_A$$ | ||
| ワークの質量 | $$m$$ | ||
| ピニオンの直径 | $$D_A$$ |
| ラックピニオンの慣性モーメント | $$J=J_A+\frac{1}{4}m_1D_A^2$$ |
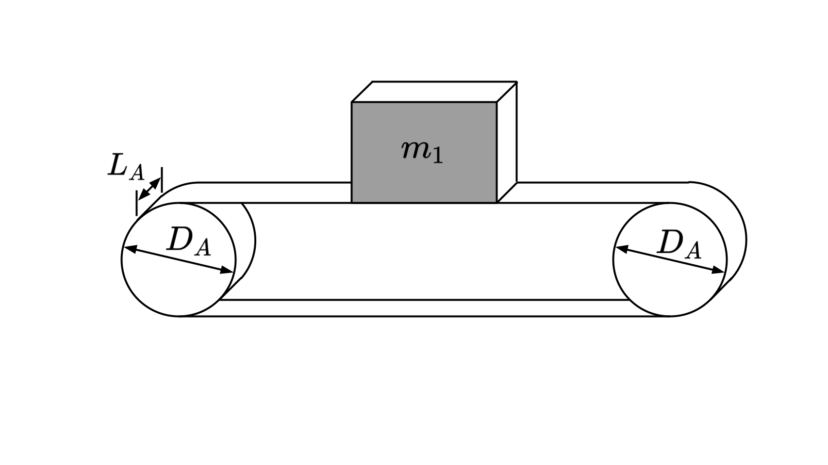
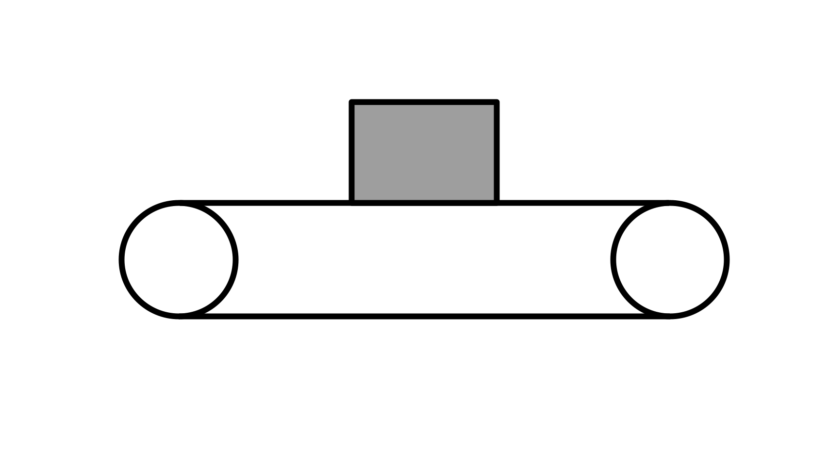
| ローラの個数 | $$n_A$$ | ||
| ローラの直径 | $$D_A$$ | ||
| ローラの質量 | $$m_A$$ | ||
| ワークの質量 | $$m_1$$ |
| ベルトコンベアの慣性モーメント | $$J=\left(\frac{n_Am_A}{8}+\frac{m_1}{4}\right)D_A^2$$ |
| ローラの個数 | $$n_A$$ | ||
| ローラの密度 | $$\rho_A$$ | ||
| ローラの直径 | $$D_A$$ | ||
| ローラの長さ | $$L_A$$ | ||
| ワークの質量 | $$m_1$$ |
| ベルトコンベアの慣性モーメント | $$J=\left(\frac{n_A\rho \pi D_A^2 L_A}{32}+\frac{m_1}{4}\right)D_A^2$$ |
| ローラの質量 | $$m_A$$ | ||
| ローラの直径 | $$D_A$$ | ||
| ワークの等価質量 | $$m_1$$ |
| ピンチローラ機構の慣性モーメント | $$J=\frac{1}{4}(m_A+m_1)D_A^2$$ |
| ローラの密度 | $$\rho_A$$ | ||
| ローラの直径 | $$D_A$$ | ||
| ローラの長さ | $$L_A$$ | ||
| ワークの等価質量 | $$m_1$$ |
| ピンチローラ機構の慣性モーメント | $$J=\left(\frac{\rho \pi D_A^2 L_A}{16}+\frac{m_1}{4}\right)D_A^2$$ |
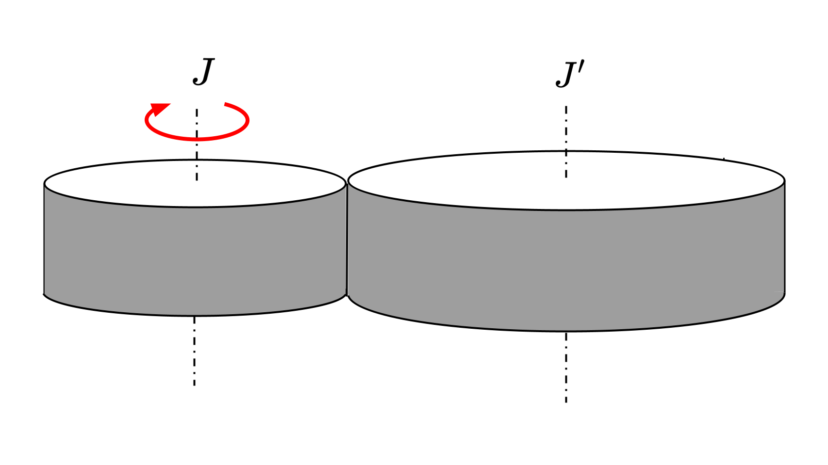
| 負荷軸の慣性モーメント | $$J'$$ | ||
| 減速比 | $$i$$ |
| モータ軸の負荷慣性モーメント | $$J=J'\frac{1}{i^2}$$ |
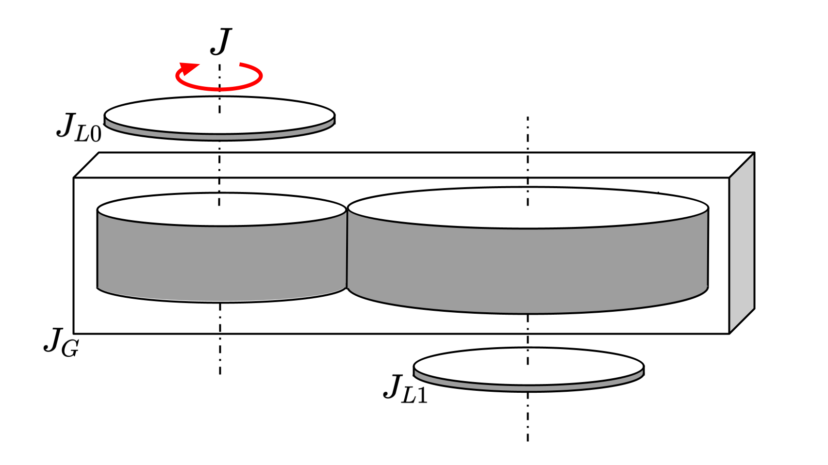
| 負荷軸の負荷慣性モーメント | $$J_{L1}$$ | ||
| 減速比 | $$i$$ | ||
| 減速機入力軸の慣性モーメント | $$J_G$$ | ||
| モータ軸の負荷慣性モーメント | $$J_{L0}$$ |
| モータ軸の全負荷慣性モーメント | $$J=J_{L1}\frac{1}{i^2}+J_G+J_{L0}$$ |

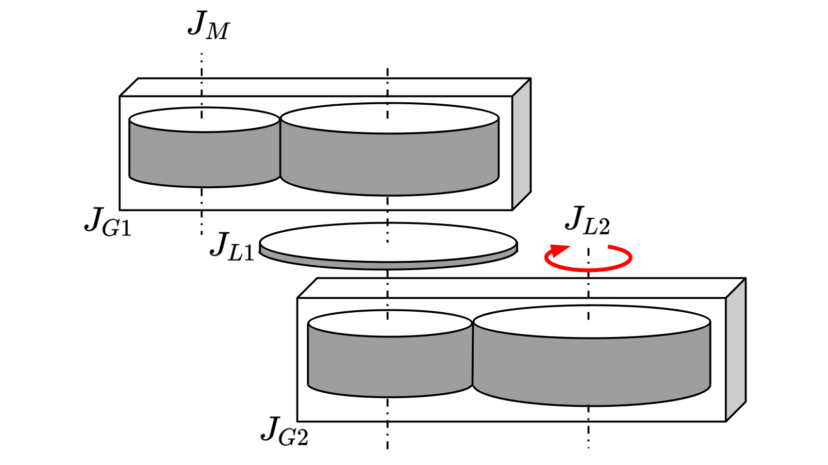
| 2段目負荷軸の負荷慣性モーメント | $$J_{L2}$$ | ||
| 2段目減速比 | $$i_2$$ | ||
| 2段目減速機入力軸の慣性モーメント | $$J_{G2}$$ | ||
| 1段目負荷軸の負荷慣性モーメント | $$J_{L1}$$ | ||
| 1段目減速比 | $$i_1$$ | ||
| 1段目減速機入力軸の慣性モーメント | $$J_{G1}$$ | ||
| モータ軸の負荷慣性モーメント | $$J_{L0}$$ |
| モータ軸の全負荷慣性モーメント | $$\displaystyle \begin{align}J=\left(J_{L2}\frac{1}{i_2^2}+J_{G2}+J_{L1}\right)\\\cdot\frac{1}{i_1^2}+J_{G1}+J_{L0}\end{align}$$ |
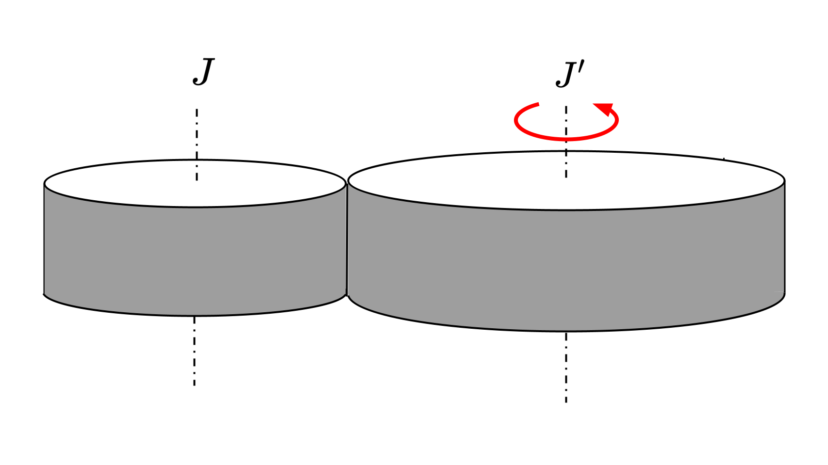
| モータ軸の負荷慣性モーメント | $$J$$ | ||
| 減速比 | $$i$$ |
| 負荷軸の負荷慣性モーメント | $$J'=i^2J$$ |

| モータ軸の負荷慣性モーメント | $$J_{L0}$$ | ||
| 減速比 | $$i$$ | ||
| 減速機入力軸の慣性モーメント | $$J_{G}$$ | ||
| 負荷軸の負荷慣性モーメント | $$J_{L1}$$ |
| 負荷軸の全負荷慣性モーメント | $$J'=i^2J_{L0}+J_G+J_{L1}$$ |
| モータ軸の慣性モーメント | $$J_{L0}$$ | ||
| 1段目減速比 | $$i_1$$ | ||
| 1段目減速機入力軸の慣性モーメント | $$J_{G1}$$ | ||
| 1段目負荷軸の負荷慣性モーメント | $$J_{L1}$$ | ||
| 2段目減速比 | $$i_2$$ | ||
| 2段目減速機入力軸の慣性モーメント | $$J_{G2}$$ | ||
| 2段目負荷軸の負荷慣性モーメント | $$J_{L2}$$ |
| 負荷軸の全負荷慣性モーメント | $$J'=((J_{L0}+J_{G1})i_1^2+J_{L1}+J_{G2})i_2^2+J_{L2}$$ |
| GD2 | $$GD^2$$ |
| 慣性モーメント | $$J=\frac{GD^2}{4}$$ |
| 慣性モーメント | $$J$$ |
| GD2 | $$GD^2=4J$$ |
ものづくりのススメでは、機械設計の業務委託も承っております。
ご相談は無料ですので、以下のリンクからお気軽にお問い合わせください。

機械設計の無料見積もり
機械設計のご依頼も承っております。こちらからお気軽にご相談ください。
構想設計 / 基本設計 / 詳細設計 / 3Dモデル / 図面 / etc...

断面積・断面二次モーメント・断面係数 計算ツール
平行キー 強度計算ツール